Yeni doğmuş bir zürafa ya da antilop için, doğarak gelmek dünyaya tehlikeli bir giriş yapma anlamına gelir. Avcılar, sürünün en zayıf üyesinde yemek için fırsat kollarlar. Bu nedenle bir çok tür, doğar doğmaz ayakta kalabilmek üzere evrimleşmiştir.
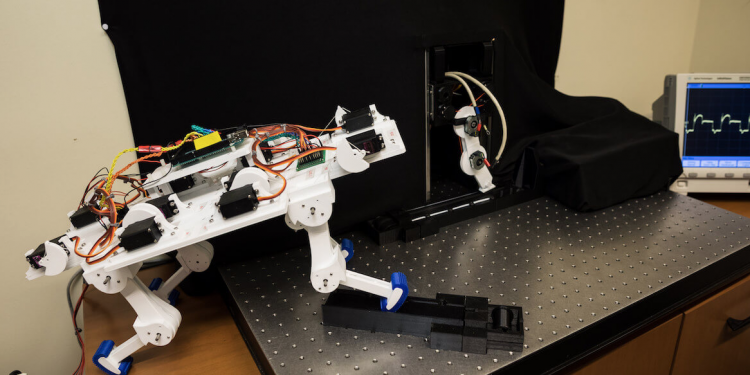
Bu ay içinde USC Viterbi Mühendislik Okulu’dan bir grup bilim insanı, biyologlar ve robotikçilere uzun süredir ilham veren hayret verici bir gelişmeyi ilk kez gerçekleştirdiklerini bildirdiler. Hayvanlardakine benzeyen, yapay bir tendon sistemini kontrol eden bir yapay zeka; daha önce açıkça hiçbir şekide konuyla ilgili programlanmamış olmasına rağmen, her bir adımda biyomekaniğini düzelterek, kendi kendine adım atmayı öğrendi.
UCS Biyokinesiyoloji ve Fizik Tedavi Bölümü’nde görevli Biyomedikal Mühendisliği Profesörü Francisco J. Valero-Cuevas ve USC Viterbi Mühendislik Okulu’ndan doktora öğrencileri Ali Marjaninejad, Dario Urbina Melendez ve Brian Cohn, yalnızca 5 dakika içinde kendiliğinden yürümeyi öğrenebilecek ve herhangi bir ek kodlama olmadan verilen görevleri yerine getirebilecek bir algoritmayı biyolojiden ilham alarak geliştirdiler.
Adaptasyon

Nature Machine Intelligence’ın Mart ayı sayısının kapağında yer alan çalışmaları ile ekip, insan hareketleri ve sakatlıklarını anlamak, duyarlı protezler geliştirmek ve uzay araştırmaları, arama kurtarma faaliyetleri gibi karmaşık değişkenlerin olduğu zorlu ortamlarda çalışabilecek robotlar için heyecan verici bir gelişme olduğunu duyurdular.
USC’de bilgisayar mühendisliği, elektrik ve elektronik mühendisliği, mekanik ve havacılık mühendisliği ve nörobilim alanlarında donanıma sahip laboratuvarlarında algoritmayı geliştiren ekibin direktörü Profesör Valero-Cuevas, “Bugünlerde bir robotun dünya ile etkileşime girerek hazır hale gelmesi için aylar veya yıllar süren eğitimlere eşdeğer bir alışma süresi geçmesi gerekiyor. Ancak biz, doğada gördüğümüz türden hızlı bir öğrenme ve adaptasyon süreci elde etmenin peşindeyiz.” dedi.
“Her birimiz olimpiyat madalyası kazanma mecburiyeti ya da hevesi içinde değiliz”

Makalenin başyazarı olan Biyomedikal Mühendisliği Bölümü doktora öğrencisi Marjaninejad, bu gelişmenin; bebeklerde gerçekleşen doğal öğrenme süreçlerine benzer olduğunu söyledi ve ekledi; “Robotun ilk yaptığı şey serbest oyun (free play ya da motor babbling) süreciyle etrafını tanımak.”
“Bacağın bu rastgele hareketleri, robotun uzvunun içsel bir haritasını ve çevre ile etkileşimlerinin oluşmasını sağlıyor.”
Makalenin yazarları, mevcut çalışmaların çoğunun aksine, kendi robotlarındaki öğrenme sürecinin; diğer örneklerde olduğu gibi paralel olarak simülasyon yapmaya ya da bir yol göstericiye gerek olmadan, yaparak (deneyerek) öğrendiğini açıkladı.Marjaninejad bu konunun özellikle önemli olduğu noktasında vurgu yaptı:
“Yazılımcılar birden fazla senaryoyu öngörebilir ve bu doğrultuda kodlar yazabilirler. Ancak her olası senaryo için bunu yapmaları mümkün değil. Bu nedenle önceden programlanmış robotlar kaçınılmaz olarak başarısızlığa eğilimliler.”
“Ancak bu yeni robotlara, amacı doğrultusundaki deneyimlerle öğrenebilme becerisi verirseniz. Sonunda bir çözüm bulurlar ve bu çözümü kullanarak ihtiyaçları doğrultusunda adaptasyon kazanabilirler. Çözüm her zaman mükemmel olmayabilir, ancak söz konusu için yeterli bir çözüm üretiyorsa yeterli olacaktır.”
Ve son olarak ekledi: “Her birimiz olimpiyat madalyası kazanma mecburiyeti ya da hevesi içinde değiliz -ya da bunun için harcayabilecek zamanımız ve enerjimiz yok.”
Şampiyon

Profesör Valero-Cuevas’nın USC’deki laboratuvarında vücutlarını ve çevrelerini keşfetme becerisi amacıyla geliştirilen robotlar, istekleri doğrultusunda “yeterli” olan kişiselleşmiş hareketleri geliştirmek için kendi özgün deneyimlerini kullandılar.
Profesör Valero-Cuevas soruyor: “Koridordan gelen birini tanıyabiliyorsunuz, çünkü belirli bir ayak sesi var, öyle değil mi?”
“Robotlarımız sınırlı deneyimlerini kullanarak bir probleme çözüm üretiyor ve ardından kişiselleştirilmiş bir alışkanlık ya da “kişilik” haline geliyor. Biz buna “nazik yürüyen”, “ağır yürüyen” ya da “şampiyon” diyoruz.. adını siz koyun…”
Yardımcı Teknolojiler

Bu teknoloji için potansiyel uygulamalar çok çeşitli. Özellikle de kullanıcıya karşı sezgisel ve duyarlı robotik uzuv ve dış iskelet gibi -uzuvlarını kaybeden insanlar için paha biçilemez olan- yardımcı teknolojilerin geliştirilmesinde.
Valero-Cuevas bu konuyla ilgili ,“Dış iskelet ve yardımcı teknolojiler doğal olarak hareketlerinizi yorumlayacak ve size karşı uyum sağlayarak isteklerinizi karşılayabilecek“ diyor.
“Çünkü robotlarımız alışkanlıklarınızı öğrenebilir ve günlük yaşamda ihtiyaç duyduğunuz işler için hareket tarzınızı taklit edebilir -hatta yeni bir şey öğrenirken, büyürken ya da zayıflarken bile.”
Bir sonraki adım
Brian Cohn, Francisco Valero-Cuevas, Ali MarjAninejad ve Dario Urbina-Melendez.
Araştırmacılara göre çalışmaları, aynı zamanda zorlu uzay araştırma ve arama kurtarma görevlerinde de güçlü bir uygulanabilirlik kapasitesine sahip olacak. Yeni bir gezegene giriş yaparken, belirsiz ve tehlikeli bir arazide ya da belki de bir doğal afet sonrası bu robotlar, yanlarında onlara eşlik edecek bir insan bulunmadan yapılması gerekenleri yapabilecekler. Bu robotlar düşük ya da yüksek yer çekimine, çarşak kayalığa ya da yağmur sonrası çamura çok hızlı adapte olabilirler.
Üstelik bu robotlar, elde ettikleri deneyimleri gelecekte uygun yerlerde yeni çözümler bulmak için de kullanırlar.
Makalenin iki ek yazarı, doktora öğrencileri olan Brian Cohn ve Dario Urbina-Melendez araştırmalarına ağırlık verdiler. USC Viterbi Mühendislik Okulu’nda Bilgisayar Bilimi doktora adayı Cohn, “Bir türün, bedenleri ve çevreleri değiştikçe hareketleri öğrenme ve uyarlama yeteneği, başından beri evrim için büyük bir itici güç oldu.” diyor ve ekliyor:
“Çalışmamız, robotlara kendi deneyimlerinden öğrenebilme ve adaptasyon becerisi kazandırmak konusunda bir adım teşkil ediyor, aynı hayvanlarda olduğu gibi.”
Bir diğer araştırmacı olan ve yaşamdan cesurca ilham alan robotların potansiyellerine inanan Biyomedikal Mühendisliği doktora adayı Urbina-Melendez ise; “Ben hayvanların birkaç ay içinde geldiği ustalık seviyesini, yanızca birkaç dakika içinde kazabilen kas güdümlü robotlar öngörüyorum.” diyor.
“Mühendislik, yapay zeka, anatomi ve nörobilimi birleştiren çalışmalarımız bunun mümkün olduğuna dair güçlü bir göstergedir.”
Orijinal çalışmaya aşağıdan ulaşabilirsiniz.
Ali Marjaninejad, Darío Urbina-Meléndez, Brian A. Cohn, Francisco J. Valero-Cuevas. Autonomous functional movements in a tendon-driven limb via limited experience. Nature Machine Intelligence, 2019; 1 (3): 144 DOI: 10.1038/s42256-019-0029-0